


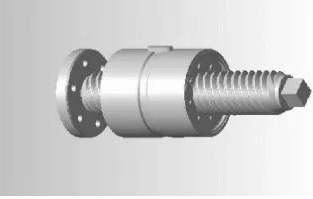
工作原理行星滚柱丝杠是:由配套的电机带动丝杠旋转,通过啮合的滚柱,将电机的旋转运动转换为螺母的直线往复运动,行星滚柱丝杠将螺旋运动与行星运动融为一体,非常适合综合性能要求较高的场合。
行星滚柱丝杠如图所示。其主要部件包括:
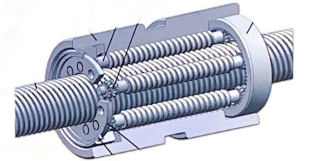
拧紧,其螺纹牙型为直角三角形(3头及以上螺纹)
坚果,其内螺纹牙型与螺钉相同。
滚筒,单头螺纹,每个滚轮的末端都有一个圆柱形枢轴和一个安装在挡板圆孔内的齿轮枢轴,以确保滚轮在径向均匀分布。轮齿与内部齿圈啮合,使滚轮平稳地向前运行。
R扣环,锁定挡板。
平键用于连接从动物体。其结构简单,拆装方便,避险性能好,适用于高速、变载、有冲击的场合。
反向行星滚柱丝杠又称反向滚柱丝杠、反向行星滚柱丝杠,是指滚柱的排列或运动方向与传统行星滚柱丝杠相反的一种直线传动装置。
反向行星滚柱丝杠体积小,负载大,配合无框电机,可用于人形机器人手臂、腿部、髋关节等。
标准行星滚柱丝杠具有转速高、承载能力强、精度高等优点,有效行程可达一米以上,非常适合极重负载环境。
人形机器人为螺丝新增了释放点。梯形螺丝和滚珠丝杠在机械机床领域已有成熟应用,行星滚柱丝杠目前仅在航空等高端领域应用。特斯拉人形机床的14个直线键将采用8-10个滚柱丝杠。
发布时间:2024年12月6日




